en plus y'as toujours le mini tuto en images ! merci pour les méthodes d'articulations.
keep up the good work ^^

Posera-t-elle à côté de ton rover ?
"Less is more" comme disait Ludwig Mies van der Rohe. Et il a fichtrement raison !

Nan, je ne pense pas, je lui réserve une toute autre destination, bien plus impromptue et étonnanteEnvoyé par maxencedt

(enfin, si j'arrive à le faire, car il y a rien de moins sûr...).

Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768

chapeau monsieur!
BanMa vitrine

Ça se précise !
C'est marrant, comparé au robot de Sansal, tu as fait les articulations des cuisses dans l'autre sens, y en a une qui peut marcher et une autre qui peut faire le grand écart. ^^

Silhouette toujours aussi harmonieuse. La tête sera t elle à la hauteur ?
Daft punk style ?
Oui j'ai vu pour les articulations, mais j'ai aussi vu l'amplitude des mouvements possibles que cela m'offrait, ma robote peut être assise en tailleur, elle possède 2 articulations de plus que le corps humain afin de palier et compenser un manque de souplesse que permettent les os parallèles des membres, à savoir le radius et le cubitus pour le bras et le tibia et le péroné pour la jambe. Donc normalement, si j'ai bien calculé mon coup, je devrais pouvoir lui faire prendre à peu près toutes les poses humaines sans tomber dans le contorsionnisme (le buste reste très rigide). Pour marcher, ma robote se sert de sa tête de fémur, comme une humaine, la rotule qui suit donne l'amplitude (style écart latéral), le cylindre qui suit fait pivoter la cuisse intérieur/extérieur et idem pour le genou, elle peut donc croiser les jambes relativement facilement, et même faire du chasse-neige ou placer ses talons dos à dos telle une danseuse étoile... (croyez-moi, ça fait quelques jours que je cogite sur ça).
La tête me fait peur en effet, même si j'ai une idée déjà bien précise de ce que j'espère obtenir... modéliser un visage...
Je me demandais même si je n'allais pas utiliser la fonction de Sculpt de C4D... et puis je me suis dit que pour le coup ce serait trop "organique" et surtout trop subdivisé pour que je puis facilement bidouiller le truc après... donc... je vais y passer un certain temps...
Ce soir je pense commencer les pieds, j'ai envie de la placer sur des talons hauts (amovibles) pour voir...
Dernière modification par Realzeb ; 18/02/2014 à 01h08.
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768

Ca fait un moment que je n'étais pas venu, tu avances bien et c'est chouette !
Bonsoir tout le monde !
Ce soir, j'en ai tellement bavé sur le pied, que je n'ai pour le moment rien de probant à montrer...
De plus, j'ai rencontré un problème qui m'a fait perdre un max de temps.
J'ai voulu, à partir de mon bras gauche entièrement terminé, créer mon bras droit de manière à ce qu'il soit indépendant (ce que n'autorise pas la fonction symétrie). Ce que je fais alors, c'est de dupliquer mon bras gauche, de le sélectionner avec tous les objets inclus et en X de lui coller une échelle -1 et cela me donne instantanément mon bras droit... oui mais voilà... tous mes axes de rotation de tous mes objets et de toutes mes articulation étaient complètement inversés ! Obligé de me les recogner un par un à la main !J'avoue avoir été très désagréablement surpris, je n'avais jamais constaté ça avant...
(C'est là qu'il existe depuis la version 4 de CD4 une fonction spéciale pour faire ça que je ne connais pas...).
Ce soir était donc une bonne soirée de galères !
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768


Toujours très agréable a suivre.... sympa le rouge a ongle.
Si tu fais de l'image, ne parle pas, n'écris pas, ne t'analyse pas, ne réponds à aucune question (R-Doisneau)

perso , je vais éditer la symétrie , sélectionner la partie gauche en mode polygone , faire une scission ,supprimer la partie gauche de la partie droite , et pour finir optimiser , et je me retrouverai avec mes 2 bras et jambes avec les axes dans le même sens
la petite galère est de ne pas se perdre dans la hiérarchie des objets enfant du parent de l'enfant du parent de l'enfant du parent de l'enfant du ......gnnnéééééé !!!!!
Dernière modification par sansalvador ; 18/02/2014 à 07h22.
Oui, c'est bien ça le souci, il y a beaucoup de p'tits n'enfants... Étrange tout de même qu'aucun outil réellement dédié à éditer une symétrie d'objets n'ait été développé au cours des différentes versions de C4D.
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768
Bizarre, normalement si tu fais ça dans le gestionnaire de coordonnées l'axe ne change pas, tu as juste les normales à inverser.
Sinon essaie de remettre -1 à l'échelle X en te mettant en mode Axe avant.
Édit : perso, ce que je fais, je mets tous mes objets à symétriser dans un neutre, je sélectionne ce neutre uniquement, dans le gestionnaire de coordonnées, je passe en mode Échelle et colle -1, ensuite clic droit > Sélectionner tous les sous objets, U~R et hop !
Dernière modification par César Vonc ; 18/02/2014 à 10h08.

Notamment avec les textures qui ne suivent pas toujours. Il reste quand même l'outil "centre des axes" qui dans sa petite fenêtre (options par défaut) permet de replacer les axes au centre de chaque objet comme son nom l'indique, lorsque que l'on à copié la symétrie et effacé les points de tous les objets d'origine.
Seuls les véritables axes d'articulation doivent être replacés sur leur pendant symétrique.
Ta robote donne méchamment envie de revoir le film I robot
Coucou les Gens !
Et bien les choses avancent lentement, mais elles avancent. J'ai jeté tout ce que j'ai fait hier, hier n'était pas un bon cru !
Et j'ai recommencé à zéro le pied de ma Robote, et c'est bien mieux ainsi... (même si j'en ai encore bien bavé sur certains trucs - Arf !).
J'ai donc opté pour un pied articulé en 2 morceaux (je me suis épargné les orteils !) et pour l'articulation du pied elle est calquée sur celle du poignet.
Et puis, je n'ai pas résisté à affubler ma Robote (il faudra que je lui trouve un p'tit nom) d'une paire de chaussures plate-forme (amovibles) très années 80-90
=> Allez les images :
Voilà pour ce soir les ami(e)s !

Dernière modification par Realzeb ; 19/02/2014 à 01h52.
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768
mouahaha excellent les chaussures en 2 parties ! bien trouvé ^^
Les chaussures sont vraiment top peut-être durcir un peu l'arête de la lanière.
Pour ce qui est de ton bras et de la symétrie dissociée, il y a l'outil miroir qui se trouve dans le menu personnage. Ca fait tout tout seul normalement (je dis bien normalement) retournement des axes etc...
L'outil du menu personnage ne retourne que les os, non ? Je ne crois pas me souvenir que ça retourne aussi les objets ? (pas le temps de tester ou de regarder, mais de mémoire...).
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768

Joli :-)
Le pied ne gagnerait pas a être plus sexy avec un talon digne de ce nom ? ça fait un peu chaussure d'handicapé la non ?
Ce soir, je tente le talon-aiguille !
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768
Une petite semelle rouge façon "Louboutin"
Hinnnnn ! Pourquoi pas ?! C'est pas vilain ça !
A voir...
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768
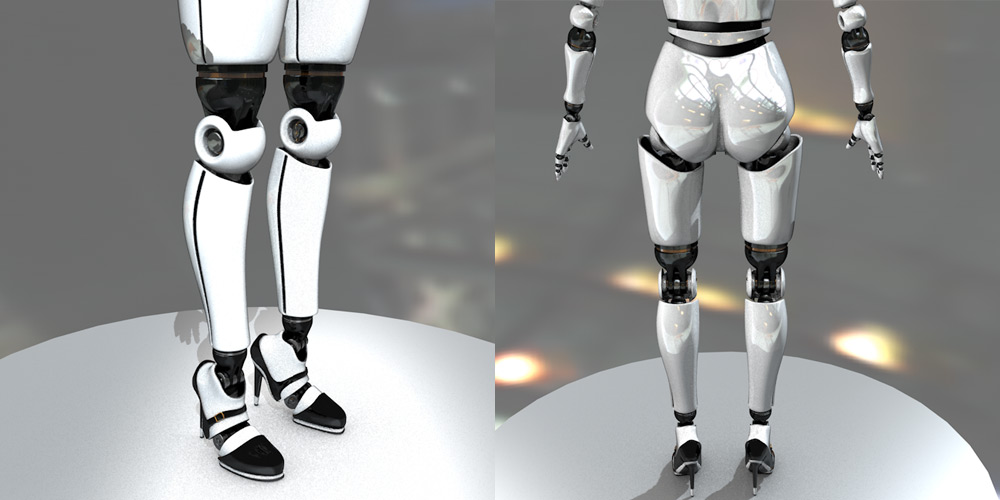
Bonsoir les Gens !
Après une longue journée bien laborieuse, ce soir, ce sera light
J'ai terminé les chaussures, je pense que je vais les garder ainsi (hormis probablement une petite modification de texturage du talon la prochaine fois), j'ai aussi affiné le pied pour le rendre plus féminin, une petite retouche à peine visible (mais qui me faisait loucher depuis longtemps) sur la ceinture abdominale et pour finir une petite vidéo d'un 360° sur Miss Robote...
=> Les Images :
=> La Vidéo :
http://frapatsai.free.fr/C4D/Film_Zeb_Robote_1.m4v
Voilà pour ce soir les amis !
PS : Si quelqu'un sait afficher une vidéo .m4v sur le site, il est le bienvenu...
Dernière modification par Realzeb ; 19/02/2014 à 23h24.
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768

Penses à renforcer l'articulation de la cheville...
Semi-nudistes Marathoniens et Campagnards
Absent, quand je ne suis pas là.
Merci aux modos pour tout et tous.
hummm! ....comment dire , dans cet accoutrement , je la vois très bien dans une caravane à la foire du trône genre chez Loulou
"Approchez ! appprochez ! venez gagnez chez Loulou , il n'y a pas de perdant chez Loulou ! " (ce qui est faux , car ou bien tu perds après avoir claqué au moins 30 euros , ou bien tu gagnes une peluche de 2 mètres de haut qui te ruine la fin de soirée car intransportable)
Pour résumer , tu lui aurait mis ces espèces de sabots en plastique qu'on appelle "Crocs" , bé , c'était pas pire
ahahaha jadore tes droïd- shoes. efficaces
BanMa vitrine
Effectivement c'est mieux. Vraiment bravo pour tout ton boulot !
"Less is more" comme disait Ludwig Mies van der Rohe. Et il a fichtrement raison !
salut ! c'est propre, net et efficace tout ça !
Bonsoir les Gens !
Ce soir, une bonne partie du temps passé l'a été sur la retouche des chaussures, j'ai calmé la semelle et changé une tonne de points de places, ça se précise, j'ai la base finale des chaussures (hormis 3 points qui m'horripilent et dont le placement me gênent vraiment sur mes captures d'écran - je change ça la prochaine fois).
=> Les Chaussures :
Vient un des moments que je redoute depuis le début... La tête et plus encore... le visage...
=> Voici mes sources d'inspiration : je vais faire un mélange de tout ça afin d'obtenir la tête de Miss Robote :
=> Début de modélisation du visage :
Voilà pour ce soir les Copines et les Copains !
Dernière modification par Realzeb ; 20/02/2014 à 23h46.
Mon très vieux site : http://frapatsai.free.fr
Mon WIP : Robotiquement vôtre / Roberta : http://frenchcinema4d.fr/showthread....eus-in-Machina
Mon WIP : Curiosity on Mars : http://frenchcinema4d.fr/showthread....=1#post1013768
Depuis le début, il y l'arrière-haut de ta chaussure qui me dérange. Pourquoi cette bosse ? Ne peux-tu pas faire en sorte que la ligne de la chaussure soit plus continue ?
la répartition du noir et du blanc est plus travaillé mais je ne sais quelle est la forme que je préfère.
bonne continuation on se régale.
"Less is more" comme disait Ludwig Mies van der Rohe. Et il a fichtrement raison !
 Règles de messages
Règles de messages


 Répondre avec citation
Répondre avec citation